Drobečková navigace
Program ALFA - Projekt číslo TA01020457 / Výzkum, vývoj a validace univerzální technologie pro potřeby moderních ultrazvukových kontrol svarových spojů komplexních potrubních systémů jaderných elektráren

Funkční vzorek byl vyvinut, realizován a využit v projektu Technologické agentury České republiky, ALFA (TA01020457, 2011-2014) a nadále bude využíván pro projekty ÚJV Řež, a. s. v rámci nedestruktivních kontrol a jejich NDE kvalifikací a ultrazvukových kontrol komponent a potrubních systémů jaderných elektráren.
text současný:
Autor: Ing. Schválil, Ing Ladislav Horáček, CSc.
Text po opravě:
Autorský tým: Ing. Václav Plajt, Ing. Petr Vlček, Ing. Jiří Uhlíř, Ing. Ladislav Horáček, CSc., Ing. Martin Švejda, Ing. Tomáš Čechura, prof. Ing. Miloš Schlegel, CSc.
Schválil: Ing Ladislav Horáček, CSc.
Jazyk výsledku: CZE
Hlavní obor: JF Jaderná energetika
Vedlejší obor: JD Využití počítačů, robotika a její aplikace JB Senzory, čidla, měření a regulace
Oblast uplatnění: Jaderná a klasická energetika, chemický a petrochemický průmysl, strojírenství
Název výsledku česky: Prototyp univerzálního manipulátoru pro ultrazvukovou diagnostiku svarů
Název výsledku anglicky: Prototype of the universal manipulator for ultrasonic weld examinations and diagnostics
Abstrakt k výsledku česky: Manipulátor pro mechanizované zkoušení ultrazvukem obvodových i podélných feritických, austenitických a heterogenních svarových spojů komplexních geometrií komponent a potrubních systémů jaderných elektráren o vnějším průměru od 230 mm s jednostranným nebo oboustranným přístupem.
Abstrakt k výsledku anglicky: The manipulator for mechanized one side or both sides ultrasonic examinations of circumferential and longitudinal, feritic, austenitic and dissimilar metal weld joints of minimal outer diameter 230 mm and complex geometry components and piping systems at nuclear power plants.
Klíčová slova česky: Manipulátor, jaderná energetika, diagnostika svarů, nedestruktivní zkoušení , robotika, řízení pohybu, metoda phased array
Klíčová slova anglicky: Manipulator, nuclear power, weld diagnostics, non-destructive testing, robotics, motion control, phased array method
Vlastník výsledku: ÚJV Řež, a. s.
IČ vlastníka výsledku: 46356088
Stát: Česká Republika
Lokalizace: ÚJV Řež, a. s., divize Integrita a technický inženýring (2300), oddělení Podpora provozu energetických zařízení (2302)
Licence: NE
Licenční poplatek: NE
Ekonomické parametry/aspekty: Funkční vzorek je využíván příjemcem (ÚJV Řež a.s., IČ 46356088)
Pořizovací hodnota: cca. 1,800 tis. Kč
Technické parametry/aspekty: Funkční vzorek je schopen realizovat mechanizovanou ultrazvukovou kontrolu se zvolenou trajektorií pohybu ultrazvukové sondy pomocí dálkového ovládání zařízení operátorem s možností variabilního nastavení parametrů ultrazvukové kontroly v závislosti na typu, materiálu, tloušťce a geometrii inspekční oblasti resp. zkušebního tělesa s necelistvostmi. Výrobek je navržen a realizován s ochranou před nebezpečným dotykovým napětím automatickým odpojením od zdroje).
| Materiál | Ocel, plast, hliník |
| Nosnost | 0,5 kg |
| Ovládání elektrické | 5, 12, 24, 72 V |
| Dosah lineární sondy | 200 - 600 mm |
| Počet stupňů volnosti | 5 |
| Počet řízených stupňů volnosti pro orientaci sondy | (orientace nosu sondy) |
| Operátorské ovládání | Dotykový konvertibilní notebook |
| Uchycení manipulátoru na potrubí | Ozubený pružný řemen, Modulární vodící řetěz |
| Elektrická výzbroj | Přenosný rozvaděč |
Popis funkčního vzorku: Konstrukce manipulátoru umožňuje provedení mechanizovaných ultrazvukových kontrol následujících typů svarových spojů vyskytujících se na potrubních systémech JE typu VVER:
1. obvodové feritické svarové spoje (trubka k trubce)
2. obvodové austenitické svarové spoje (trubka k trubce)
3. podélné austenitické svarové spoje kolen potrubních systémů
4. obvodové svarové spoje nátrubku k potrubí
Klíčové etapy vývoje univerzálního manipulátoru SÁVA:
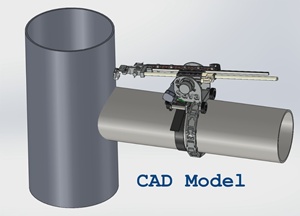
CAD model univerzálního manipulátoru SÁVA
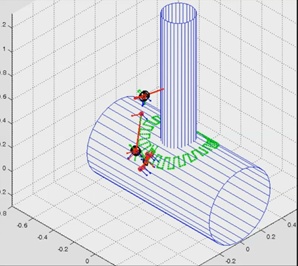
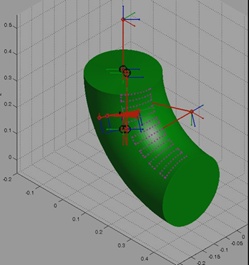
Simulace řízení pohybu a trajektorií pohybu sondy pomocí modulů sw MATLAB
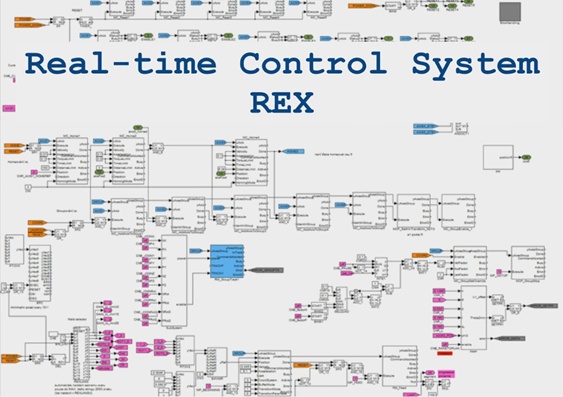
Vývoj specifických algoritmů a knihoven řídícího systému REX v reálném čase
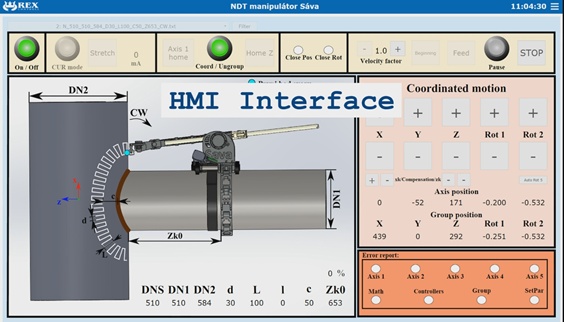
Interface HMI grafického rozhraní

Propojení univerzálního manipulátoru SÁVA s PAUT systémem (s ultrazvukovým defektoskopem s modulem phased array)


Mechanizovaná PAUT kontrola (PHASED ARRAY KONTROLA ULTRAZVUKEM) pomocí univerzálního manipulátoru SÁVA austenitických svarových spojů komponent složitých geometrií – sedlový svar nátrubku k trubce primárního okruhu



Mechanizovaná PAUT kontrola (ultrazvuková kontrola technikou phased array) pomocí univerzálního manipulátoru SÁVA austenitických svarových spojů komponent složitých geometrií – vnitřní a vnější podélný svar kolena Js 240 mm potrubí kompenzace objemu primárního okruhu
